
研究成果research
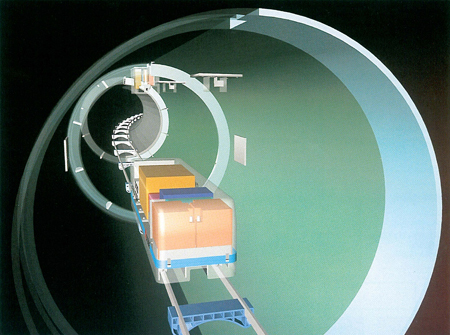 | 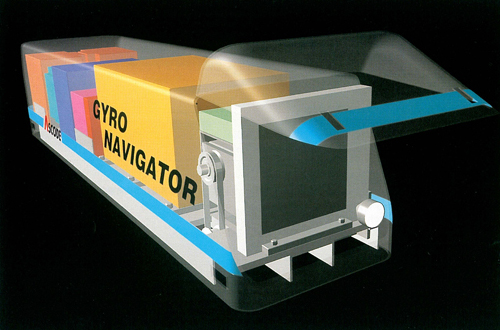 | |
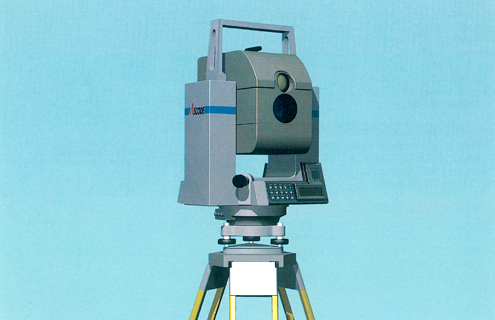
| 下水道整備における推進工事の長距離曲線化は増加傾向にあり、掘進の技術的進歩は著しいものの、その測量に関してはいまだ人力で行っているのが現状です。このような背景のなか開発されたのが自動測量ロボット通称「ジャイロナビゲーター」です。ジャイロナビゲーターは、長距離曲線推進工事の測量作業に伴う苦渋作業からの開放、測量精度の向上及び効率化を可能とします。 | ||
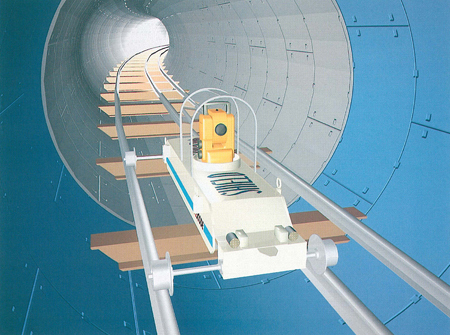 | 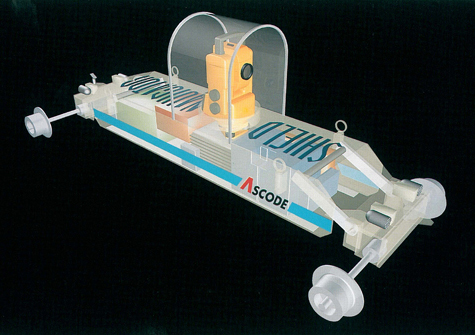 | |
| 中小口径のシールド工事においても推進工事同様、その測量に関しては人力作業に頼らざるを得ない現状があり、苦渋作業・施工能率の低下といった問題があります。シールド工事における坑内測量は掘進機の方向制御の基本となるべきものであるため、測量作業の自動化は非常に重要です。シールド自動測量ロボット通称「シールドナビゲーター」は坑内の軌条を自動走行するため、あらゆる口径に対応可能な測量システムです。 | ||
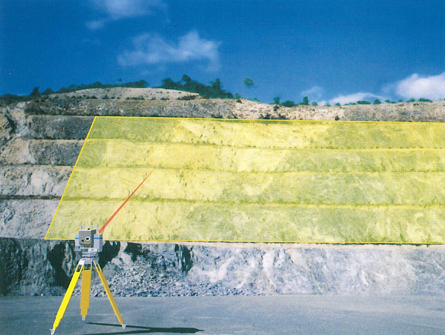 |  | |
| 大規模土工事では、多量の土砂や岩石が運搬され地形が刻々と変化します。 変化する土量を定量的に把握する出来高測量は、工事の進捗状況の確認、 必要運搬土量の推定、施工ミスの発見等原価管理に大きく影響します。 従来の測量では計測面を歩行する人と測距儀で計測する人の2人以上で長時間かけて作業していましたが、 ノンプリズム出来高自動計測システムではそれらの作業を1人で行うことにより高精度かつ省力化が可能となります。 | ||
 | 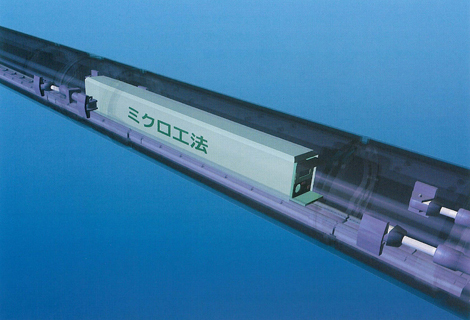 | |
| ミクロ工法は、下水道などのライフラインの整備が大都市から中小都市へ移行するなか、 小口径・長距離・曲線施工のニーズに応えた推進工法です。開発より数多くの実績を積んで参りました。 現在はミクロ(泥水二工程式)・スーパ−ミクロ(泥水一工程式)の工法を各型式に変更し、呼称を最も慣れ親んだ「ミクロ工法」に統一しました。 | ||
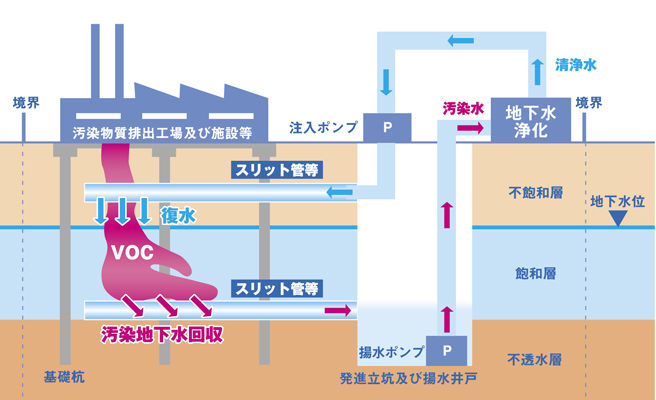 |  | |
| マルチ水平ウェル工法は、特殊スリット管を用いた水平井戸築造工法です。 地上に構造物や樹木がある場合でもその直下に容易に設置可能です。この特長を活用し、 揮発性有機化合物(VOC)等で汚染された地下水の浄化工事、地下水位低下工事及び地下水の取水源工事の効率的な施工を実現します。
| ||
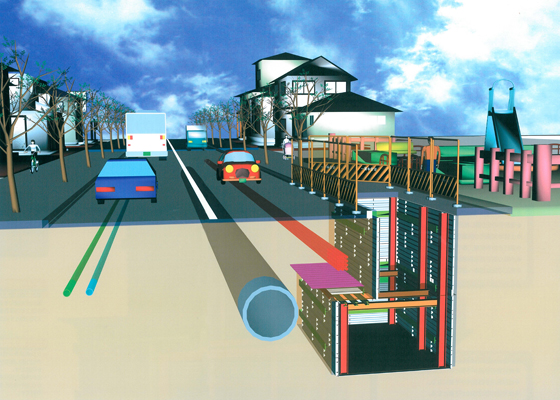 |  | |
| 拡幅ライナー立坑は、既設埋設管を避けた掘削や、歩道・路側帯のみの開口で車道下に新たな管路を構築することを 可能とする目的で開発した工法です。 ライナープレート立坑の上部を省スペースの開口部で築造し、 支障物がなくなった時点で拡幅ライナーを使用することにより、推進施工に必要な作業空間を立坑下部に確保できます。 | ||
 |
 |
 |
| 老朽化したコンクリート構造物を補修する際、最初に劣化部コンクリートの除去が必要になります。「吸着自走式ウォータージェットはつりロボット」は、構造物の壁面に真空吸着し、コンクリート表面を自走しながらウォータージェットによるはつり作業を行うリモコン式のロボットです。 | ||